 平台热线
平台热线



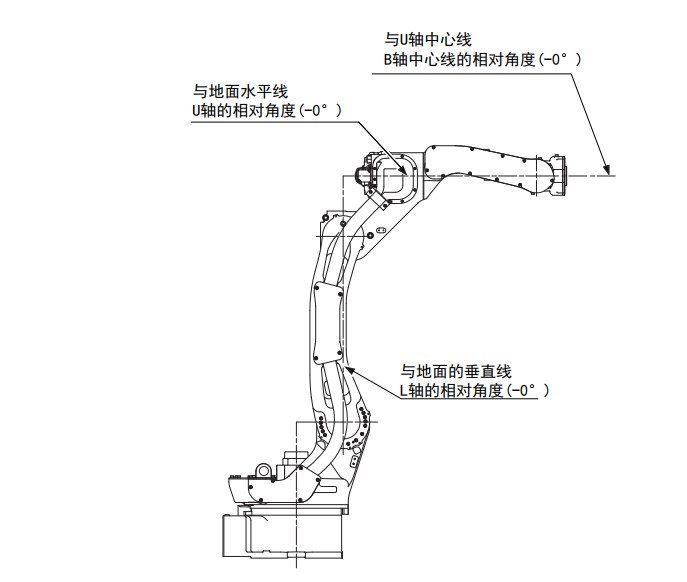
一般垂直全轴多关节机器人的原点姿势如下所示。
第二原点位置的设定
操作机器人前,按照以下操作确认伺服电源已切断。伺服电源被切断后,示教编程器上伺服接通的LED灯会熄灭。
–按下YRC1000的前门、示教编程器以及外部操作机器等的急停按钮。
-拔下安全栏的安全插座。(示教模式、远程模式时)紧急情况下,若不能及时停止机器人动作,则可能导致人员受伤,设备受损。在机器人动作范围内进行示教时,请遵守以下事项。–示教人员进入安全栏内时,注意不得上锁。另外,要做好标识告知有人正在安全栏内,其他人不得关闭安全栏。
-保持从正面观察机器人。
-遵守操作步骤。
-必须保持警惕,事先考虑好机器人突然向自己所处方向运行时的对策。
–确保有躲避的空间,以防万一。误操作或机器人不按示教内容操作,可能导致人员受伤。
进行以下作业时,请确认机器人动作范围内没人,并且操作人员在安全位置。
-接通YRC1000电源。
-用示教编程器操作机器人时。-试运行时。
-自动运行时。若不慎进入机器人的动作范围,可能会与机器人发生碰撞,而导致人员受伤。另外,发生异常时,请立即按下急停按钮。急停按钮在 YRC1000的前门处及示教编程器的右侧。
进行第二原点(检查点)的位置确认时,请确保周围安全。发生***值允许范围异常的报警时,原因一般是PG系统异常。所以机器人有可能会有意想不到的动作,导致人员受伤或机器受损。进行机器人示教作业前,请检查以下事项,若发现有异常,应立即维修及采取其他必要措施。
-机器人动作有无异常
-外部电线遮盖物或外包装有无破损·示教编程器用完后,必须放回指定位置。
若不慎将示教编程器放置在机器人、夹具或地面上,则当机器人动作时,可能会与机器人或夹具碰撞,而导致人员受伤、设备受损。示教编程器模式切换开关的钥匙请由系统管理员保存。请在操作完成后,拔出钥匙,交还给系统管理员保存。否则,误操作或者机器人不按示教内容动作,可能导致人员受伤。另外,示教编程器在插着钥匙状态下掉落在地,可能导致钥匙及模式切换开关的受损。
操作目的:
通电前后,若马达编码器的***值旋转数据不一致时,接通控制柜后,会发生4107报警显示“***数据允许范围异常”。有以下两种情况会发生报警。
PG系统异常
PG系统正常,但是电源关闭后,机器人本体位置发生了变化。
PG系统有异常的情况下,按下启动按钮机器人开始再现动作时,机器人会有意想不到的动作,非常危险。
因此,为了确保安全性,发生***值允许范围异常报警后,只有确认第二原点位置的操作完成后,才能进行再现或试运行。
图中①~③的说明
①发生***值允许范围异常报警后,通过轴操作确认第二原点位置。若未确认第二原点位置,则不能进行再现和试运行操作。
②比较第二原点位置的脉冲和当前位置的脉冲值,若脉冲值差在允许范围内,则可进行再现操作。
若超出允许范围的,则会再次发出异常报警。
·允许范围脉冲值为PPR值(马达转动一周的脉冲值)。
·第二原点位置的初始值是原点位置(全轴О脉冲的位置),但可以更改。请参照。「8.2.2“第二原点位置(检查点)的设定方法”」。③再次发生异常报警时,一般是PG系统异常,请进行检查。
了解更多请点击:安川机器人服务商
