 平台热线
平台热线



修改程序点
如下所示插入移动命令时,(根据示教条件画面设定),插入的行是不同的。
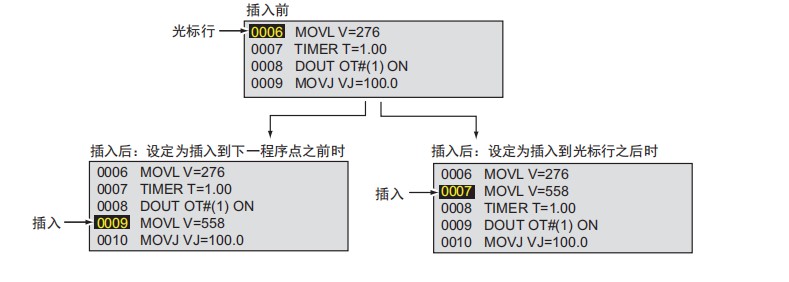
关于插入移动命令的位置
机器人出厂时,设定为插入到“下一程序点之前”,但也可以设定插入到“下一个光标行”。可以在示教条件画面中设定“移动命令登录方法”。
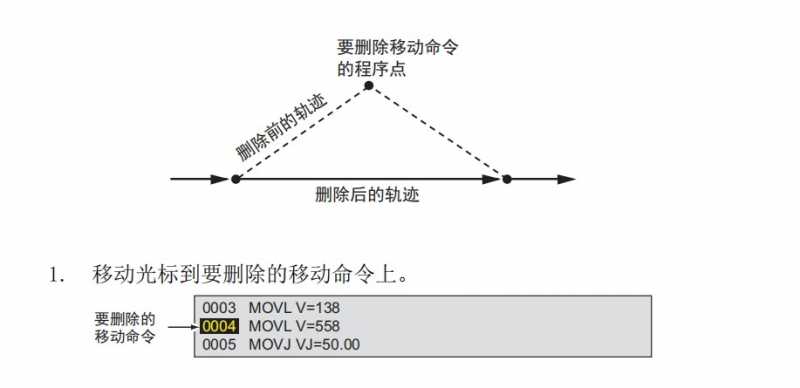
删除移动命令
机器人的位置和光标行的位置数据不一致时,光标闪烁,位置一致时光标灯亮。
更改移动命令
更改位置数据
闪烁时若想要灯亮,请完成下面任一操作。
①按下〔前进],移动机器人到要删除的移动命令的位置上。②按下「[修改]→[回车],将正在闪烁的光标行的位置数据更改为机器人的当前位置。
–该按键的的灯变亮。3.按下[回车]。
-光标行的程序点被删除。

1.移动光标到要更改的移动命令上。
-显示程序内容画面,移动光标到要更改位置数据的移动命令上。
2.按下「[轴操作键]。
–接通伺服电源,然后按下[轴操作键],移动机器人到更改后的位置上。
3.按下[修改]。
-该按键的灯变亮。4.按下[回车]。
-位置数据更改为机器人的当前位置。
1.移动光标到要更改的移动命令上。
–显示程序内容画面,移动光标到要更改插补方法的移动命令上。
2.按下[前进]。
–接通伺服电源,按下〔前进],移动机器人到光标行的移动命令的位置上。3.按下[删除]。
-该按键的灯变亮。
4.按下[回车]。
-删除光标行的程序点。
5.按下〔插补方式]。
-从1开始多次按下[插补方式],选择更改后的插补方法。-每次按下〔插补方式],可以切换输入缓冲区的命令。
6.按下〔插入]。
7.按下[回车]。
-可以同时更改插补方法或位置数据。
了解更多请点击:安川机器人服务商
