 平台热线
平台热线



使用再现模式(PLAY )进行机器人连续动作确认。此方式为机器人实际自动运转状态,操作前务必确认机器人动作范围内有无干涉,人员保持于安全范围外,并随时注意机器人动作。
操作步骤:
1.示教完成后,将光标移动到起始位置行列前。
2.将模式开矣切换至[PLAY]再现模式。
3.按[伺服准备]键,此时伺服电源指示灯亮起。
4.确认机器人周围安全后,按下[START]启动键,机器人便依照程序开始运行。

5.再现模式动作中,如需中断动作可以按[ HOLD]键将动作暂停,重新启动则再按一.次[ START]启动即可继续动作。
*再现模式运行状态下,机器人轨迹再现移动速度为示教时的指令速度。
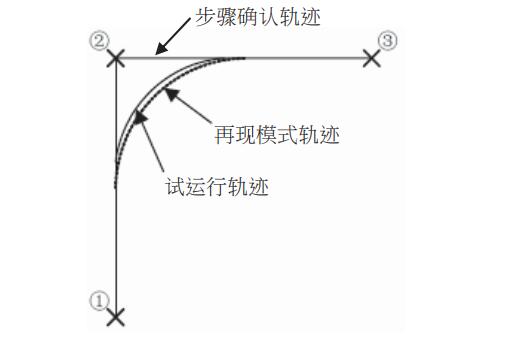
运行轨迹:三种再现方式 ,运行轨迹会有些微差异,如附图所示。
步骤确认的移行轨迹,由于是各点单独移动,所以再现时会确实移动到示教点位后,
当使用者再次按下[前进]才会往下个点位移动。而试运行及再现模式连续动作的情况下,机器人为避免各点位间的顿点情况,在点位移动间会自行微调同服电机的运动量及速度,如下图所示,第1点至第2点的移动要转.换到第2点至第3点的移动时, 会造成一一个内弧 角的情形。而试运行轨迹与实际再现模式的轨迹因为机械误差后控制滞后的情形, 也会有些微的偏差,在精密动作时需注意此情形的发生。
了解更多请点击:安川机器人服务商
