 ЦНЬЈШШЯп
ЦНЬЈШШЯп



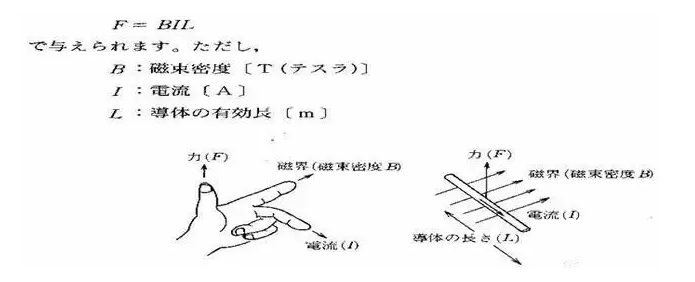
ЕчЛњЖЏзїЕФдРэ
гвЪжТна§ЗЈдђЃЈАВХрЖЈдђЃЉЁЊЁЊЭЈЕчЩњДХ
АВХрЖЈдђЃЌвВНагвЪжТна§ЖЈдђЃЌЪЧБэЪОЕчСїКЭЕчСїМЄЗЂДХГЁЕФДХИаЯпЗНЯђМфЙиЯЕЕФЖЈдђЁЃЭЈЕчжБЕМЯпжаЕФАВХрЖЈдђЃКгУгвЪжЮезЁЭЈЕчжБЕМЯпЃЌШУДѓФДжИжИЯђЕчСїЕФЗНЯђЃЌФЧУДЫФжИЕФжИЯђОЭЪЧДХИаЯпЕФЛЗШЦЗНЯђЃЛЭЈЕчТнЯпЙмжаЕФАВХрЖЈдђЃКгУгвЪжЮезЁЭЈЕчТнЯпЙмЃЌЪЙЫФжИЭфЧњгыЕчСїЗНЯђвЛжТЃЌФЧУДДѓФДжИЫљжИЕФФЧвЛЖЫЪЧЭЈЕчТнЯпЙмЕФNМЋЁЃ

ИЅРДУїзѓЪжЗЈдђЁЊЁЊДХЩњСІ
ШЗЖЈдиСїЕМЯпдкЭтДХГЁжаЪмСІЗНЯђЕФЖЈдђЁЃгжГЦЕчЖЏЛњЖЈдђЁЃзѓЪжЦНеЙЃЌДѓФДжИгыЦфгр4жИДЙжБЃЌЪжаФГхзХNМЖЃЌ4жИЮЊЕчСїЗНЯђЃЌДѓФДжИЮЊдиСїЕМЯпдкЭтДХГЁжаЪмСІЗНЯђЁЃ
1. ПижЦЦїЃКЖЏзїжИСюаХКХЕФЪфГізАжУЁЃ
2. Ч§ЖЏЦїЃКНгЪеПижЦжИСюЃЌВЂЧ§ЖЏТэДяЕФзАжУЁЃ
3. ЫХЗўТэДяЃКЧ§ЖЏПижЦЖдЯѓЁЂВЂМьГізДЬЌЕФзАжУЁЃ
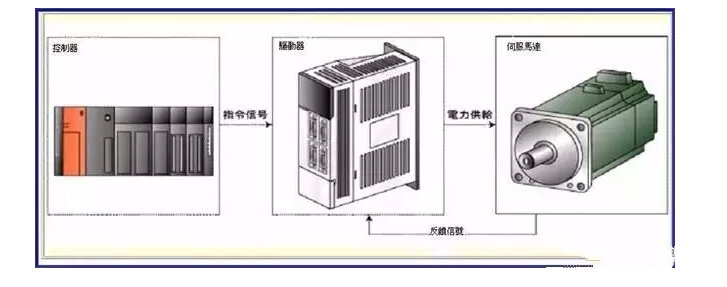
ЫХЗўТэДяЕФжжРрЃЌДѓжТПЩЗжГЩвдЯТШ§жжЃК
1. ЭЌВНаЭЃКВЩгУгРДХЪНЭЌВНТэДяЃЌЭЃЕчЪБЗЂЕчаЇгІЃЌвђДЫЩВГЕШнвзЃЌ ЕЋвђжЦГЬВФСЯЩЯЕФЮЪЬтЃЌТэДяШнСПЪмЯожЦЁЃЁВЛизЊзгЃКгРОУДХЬњЃЛЙЬЖЈзгЃКЯпШІЁГ
2. ИагІаЭЃКИагІаЮТэДягыЗКгУТэДяЙЙдьЯрЫЦЃЌЙЙдьМсЙЬЁЂИпЫйЪБзЊОиБэЯжСМКУЃЌЕЋТэДяНЯвзЗЂШШЃЌШнСП(7.5KWвдЩЯ)ДѓЖрЮЊДЫаЮЪНЁЃЛизЊзгЁЂЙЬЖЈзгНдЮЊЯпШІЁГ
3. жБСїаЭЃКжБСїЫХЗўТэДяЃЌгаЬМЫЂдЫзЊФЅКФЫљВњЩњЗлГОЕФЮЪЬтЃЌгкЮоГОвЊЧѓЕФГЁЫљОЭВЛвЫЪЙгУЃЌвдаЁШнСПЮЊжїЁЃЁВЛизЊзгЃКЯпШІЃЛЙЬЖЈзгЃКгРОУДХЬњЃЛећСїзгЃКДХЫЂЁГЁЃ
ЫХЗўТэДяЕФжжРр
РДдДЃКЭјТч(Чж ЩОЃЉ
СЫНтИќЖрЧыЕуЛїЃКАВДЈЛњЦїШЫ
