 平台热线
平台热线



一、 考虑管线分布与机器人轨迹的空间关系
机器人焊枪从夹具底梁下方通过,如果管线分布不合理将会影响焊接。

管线分布与机器人焊枪位置示意
优化建议:在夹具设计阶段对夹具和安川机器人进行运动协调仿真,在不影响焊接的情况下,尽量合理分布气动元件及管线,当采用硬管如铜管时应在气路上标明管线的走向,避让焊枪。
二、合理运用气路,简化夹具结构
汽车排气系统焊装夹具通常会遇到启动元件防掉落的问题,气缸手动伸出,螺母安装到位后,应保持安装位置,不能因为气缸自重落下。通常的解决方案是在气缸行程方向增加一个小型气缸对其进行穿销锁止。
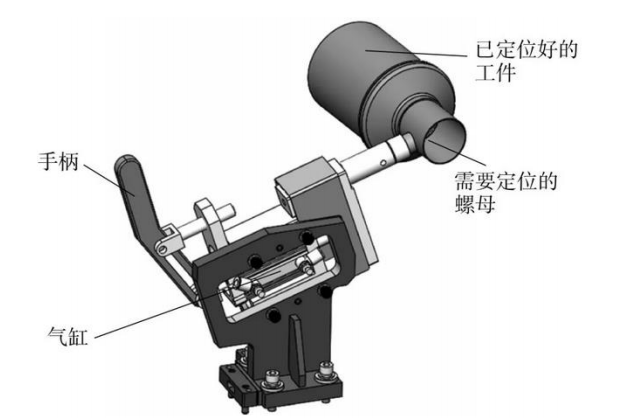
需要防掉落的定位组件示意
优化方案:防掉落回路,原理是通过增加一个溢流阀,在重物升起时单向锁定,落下时气动解锁,气缸退回。通过调整气路简化气路结构,降低设计制造成本。
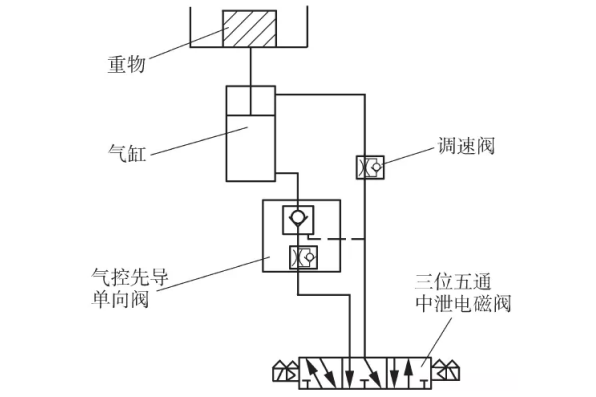
气控先导单向阀防掉落回路
三、合理安排走线
考虑增加走线槽。未增加线槽的夹具,管线凌乱。
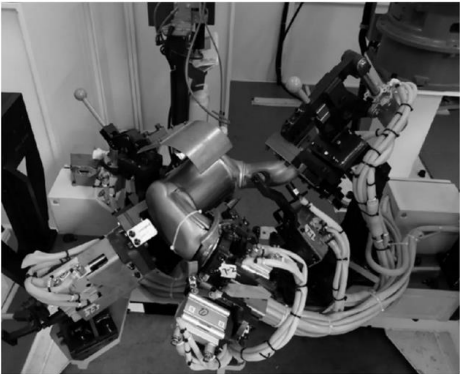
气管未按线槽布线的夹具
优化方案:增加走线槽的夹具,更加整齐美观。
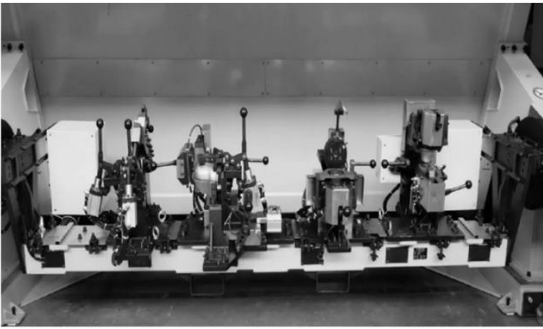
气管按线槽布线的夹具
四、考虑采用阀岛
阀岛是由多个电控阀构成的控制元器件,它集成信号输入、输出及信号的控制,是新一代气电一体化控制元器件。由于其高度集成及高防护等级的特性,接线方式简单,占用空间小,正逐步应用于汽车焊装夹具领域中。
汇流排式安装,需要 2 个机箱安装电磁阀和电气模块组件,管线多且占用空间大。阀岛安装型夹具,其布线简单,占用空间小。
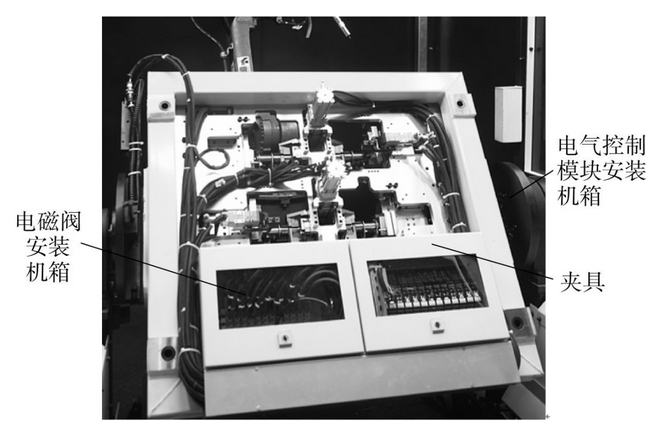
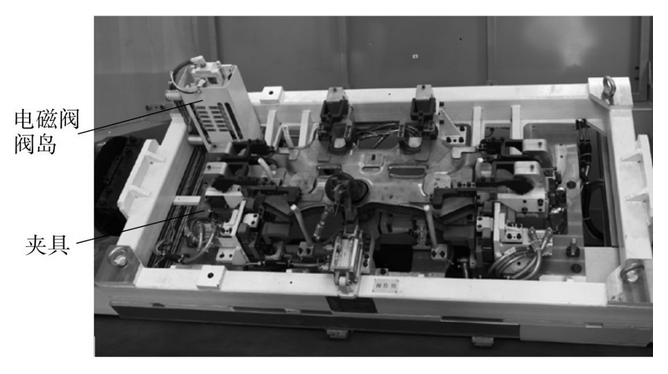
电磁阀阀岛式安装
五、考虑使用温度
在实际应用中会遇见气缸密封件软化或脆裂的情况。这种情况需要考虑气动元件的使用温度,一般推荐在 0~60 ℃环境下使用,超过此温度应选择相应的耐超低温气缸或耐超高温气缸。
了解更多机器人咨询请点击:安川机器人
